パルス幅変調の動作原理。 PWM - パルス幅変調とは何ですか? PWM の副作用を軽減する
パルス幅変調 (PWM) は、パルス幅 (デューティ比) が変化しますが、周波数は一定のままである信号変換方式です。 英語の専門用語では、PWM (パルス幅変調) と呼ばれます。 この記事では、PWM とは何か、どこで使用されるか、どのように機能するかについて詳しく説明します。
適用範囲
マイクロコントローラー技術の発展により、PWM に新たな機会が開かれました。 この原則が基礎となりました 電子機器、出力パラメータの調整と、それらを所定のレベルに維持することの両方が必要です。 パルス幅変調方式は、光の明るさやモーターの回転速度を変えるほか、パルス型電源(PSU)のパワートランジスタの制御にも使用されます。
パルス幅 (PW) 変調は、LED 輝度制御システムの構築に積極的に使用されています。 LED は慣性が低いため、数十 kHz の周波数でスイッチング (点滅と消灯) する時間があります。 パルスモードでの動作は、人間の目には一定の輝きとして認識されます。 さらに、明るさは 1 周期内のパルスの持続時間 (LED のオープン状態) に依存します。 パルス時間が休止時間と等しい場合、つまりデューティ サイクルが 50% の場合、LED の明るさは公称値の半分になります。 220V LED ランプの普及に伴い、不安定な入力電圧での動作の信頼性を高めることが問題になりました。 この解決策は、パルス幅またはパルス周波数変調の原理に基づいて動作するパワードライバーであるユニバーサルマイクロ回路の形で発見されました。 これらのドライバーの 1 つに基づく回路について詳しく説明します。
ドライバチップの入力に供給される主電源電圧は回路内の基準電圧と常に比較され、出力にPWM(PWM)信号が生成されます。そのパラメータは外部抵抗によって設定されます。 一部のマイクロ回路には、アナログまたはデジタル制御信号を供給するためのピンがあります。 したがって、仕事 パルスドライバー別の PHI コンバータを使用して制御できます。 興味深いのは、LEDが高周波パルスを受信するのではなく、そのような回路の必須要素であるインダクタによって平滑化された電流を受信することです。
PWM の大規模な使用は、LED バックライトを備えたすべての LCD パネルに反映されています。 残念ながら、LED モニターでは、ほとんどの PWB コンバーターが数百ヘルツの周波数で動作するため、PC ユーザーの視力に悪影響を及ぼします。
Arduino マイクロコントローラーは、PWM コントローラー モードでも動作できます。 これを行うには、AnalogWrite() 関数を呼び出し、かっこ内に 0 ~ 255 の値を示します。ゼロは 0V、255 は 5V に対応します。 中間値は比例的に計算されます。
PWM原理で動作するデバイスの広範な普及により、人類はリニアタイプの変圧器電源から遠ざかるようになりました。 その結果、効率が向上し、電源の重量とサイズが数分の1に削減されます。
PWM コントローラは、最新のスイッチング電源に不可欠な部分です。 パルストランスの一次回路にあるパワートランジスタの動作を制御します。 フィードバック回路の存在により、電源の出力電圧は常に安定した状態に保たれます。 出力電圧のわずかな偏差 フィードバック制御パルスのデューティサイクルを即座に修正するマイクロ回路によって修正されます。 さらに、最新の PWM コントローラーは、電源の信頼性を高めるために役立つ多くの追加タスクを解決します。
- コンバータにソフトスタートモードを提供します。
- 制御パルスの振幅とデューティサイクルを制限します。
- 入力電圧レベルを制御します。
- から保護します 短絡および電源スイッチの過剰な温度。
- 必要に応じて、デバイスをスタンバイ モードに切り替えます。
PWMコントローラーの動作原理
PWM コントローラーの役割は、制御パルスを変更して電源スイッチを制御することです。 スイッチング モードで動作する場合、トランジスタは 2 つの状態 (完全に開いた状態、完全に閉じた状態) のいずれかになります。 閉じた状態では、p-n 接合を流れる電流は数 μA を超えません。これは、電力損失がゼロになる傾向があることを意味します。 オープン状態では、大電流にもかかわらず、pn 接合の抵抗は非常に低く、これにより熱損失もわずかになります。 最大数量熱は、ある状態から別の状態に移行する瞬間に放出されます。 ただし、変調周波数に比べて遷移時間が短いため、スイッチング時の電力損失はわずかです。
パルス幅変調は、アナログとデジタルの 2 つのタイプに分けられます。 各タイプには独自の利点があり、さまざまな回路方法で実装できます。
アナログPWM
アナログ PWM 変調器の動作原理は、周波数が数桁異なる 2 つの信号を比較することに基づいています。 比較素子はオペアンプ(コンパレータ)です。 高い一定周波数の鋸歯状電圧が入力の一方に供給され、可変振幅の低周波変調電圧がもう一方の入力に供給されます。 コンパレータは両方の値を比較し、出力に方形パルスを生成します。その期間は変調信号の現在の値によって決まります。 この場合、PWM 周波数は鋸歯状信号の周波数と等しくなります。
デジタルPWM
デジタル解釈におけるパルス幅変調は、マイクロコントローラー (MCU) の多くの機能の 1 つです。 デジタル データのみで動作する MK は、出力で高 (100%) または低 (0%) の電圧レベルを生成できます。 ただし、ほとんどの場合、負荷を効果的に制御するには、MC 出力の電圧を変更する必要があります。 たとえば、エンジン回転数の調整、LED の明るさの変更などです。 マイクロコントローラー出力で 0 ~ 100% の範囲の電圧値を取得するにはどうすればよいですか?
この問題は、指定されたスイッチング周波数が制御対象デバイスの応答よりも数倍高い場合に、パルス幅変調方式を使用し、オーバーサンプリング現象を利用することで解決されます。 パルスのデューティサイクルを変更すると、出力電圧の平均値が変化します。 一般に、プロセス全体は数十から数百 kHz の周波数で発生するため、スムーズな調整が可能になります。 技術的には、これは PWM コントローラーを使用して実装されます。PWM コントローラーは、あらゆる機器の「心臓部」である特殊なマイクロ回路です。 デジタルシステム管理。 PWM ベースのコントローラーを積極的に使用するのは、否定できない利点があるためです。
- 高い信号変換効率。
- 仕事の安定性。
- 負荷によって消費されるエネルギーを節約します。
- 低コスト;
- 装置全体の信頼性が高くなります。
ハードウェアとソフトウェアの 2 つの方法で、マイクロコントローラー ピンで PWM 信号を受信できます。 各 MK には、特定のピンで PWM パルスを生成できるタイマーが内蔵されています。 このようにしてハードウェア実装が実現されます。 ソフトウェア コマンドを使用して PWM 信号を受信すると、分解能の点でより多くの可能性があり、より多くのピンを使用できるようになります。 ただし、ソフトウェアによる方法では MK の負荷が高く、多くのメモリを消費します。
デジタル PWM では、周期ごとのパルス数が異なる可能性があり、パルス自体が周期のどの部分に配置されてもよいことに注意してください。 出力信号レベルは、1 周期あたりのすべてのパルスの合計持続時間によって決まります。 それぞれの追加パルスはパワー トランジスタを開状態から閉状態へ遷移させるものであり、スイッチング中の損失の増加につながることを理解してください。
PWMレギュレータの使用例
単純な PWM レギュレータを実装するためのオプションの 1 つは、すでに前に説明しました。 マイクロ回路に基づいて構築されており、小さなハーネスが付いています。 しかし、回路の設計が単純であるにもかかわらず、このレギュレータは、LED、LED ストリップの明るさを制御する回路、DC モーターの回転速度を調整する回路など、かなり幅広い用途があります。
こちらもお読みください
PWM または PWM (パルス幅変調) の動作についての誤解は、誤った使用につながるだけでなく、制御に PWM を使用するデバイスの設計ミスにさえつながることがよくあります。 ここでは、特定のアプリケーションに限定して、PWM とは何か、なぜ必要なのか、どのように機能するのかを説明します。
まず、PWMとは何でしょうか?
PWM が必要になるのはどのような場合ですか?
PWM を使用する主な理由は、特に制御された電気ドライブにおいて、高効率を維持しながら電子機器に電力を供給するために低 DC 電圧を供給する必要があることです。
で 内部ネットワークデバイスに電力を供給する機器は、限られた電圧セットの定電圧を使用するため、多くの場合、要件に合わせて変更する必要があります。 特定のデバイス、それを安定化または調整します。
これらは、DC 電気ドライブ、チップ、無線機器コンポーネントなどです。
調整は、電圧減衰デバイス(抵抗器、トランジスタ)を使用して実行できます(調整が必要な場合)。 このソリューションの主な欠点は、電力損失と制御デバイスの発熱量の増加です。
解放される電力は次と等しいことが知られているため、
P = I x U または P = I 2 x R W。
回路内の電流 I と電圧降下 U が大きいほど、電力損失は大きくなります。ここで R は制御素子の抵抗値です。
これはクエンチング抵抗器や半導体デバイスにも当てはまります。
しかしよく知られているのは、 半導体デバイス開閉状態が 2 つしかない場合、キーとして (損失と発熱が少なく) 非常にうまく機能します。
このモードでは、スイッチング半導体デバイスの損失を次のレベルまで削減できます。
P max = I x U us
最新の半導体スイッチの電圧は 0.3V に近づき、消費電流が 10A の場合、電力損失は 3W に近づきます。
|
これはスイッチ モードの場合であり、PWM デバイスで動作している場合はさらに少なくなります。 PWM は、主要な要素としてスイッチング モードの半導体デバイスを使用します。つまり、トランジスタは常に開いている (オフになっている) か閉じている (飽和状態にある) かのいずれかです。 最初のケースでは トランジスタの抵抗はほぼ無限大であるため、回路内の電流は非常に小さく、電源電圧はすべてトランジスタ両端で降下しますが、トランジスタによって放出される電力は実質的にゼロになります。 2番目のケースでは トランジスタの抵抗は非常に低いため、トランジスタ両端の電圧降下はゼロに近く、放出される電力も小さくなります。 過渡状態では |
(導通状態から非導通状態へのスイッチの遷移、およびその逆)スイッチで放出される電力は大きくなりますが、遷移状態の継続時間は変調周期に比べて非常に短いため、スイッチングの平均電力は損失はわずかであることが判明します。
PWM を使用することで、DC 電圧を低減および調整する回路でキー モードの利点を実現できるようになりました。
繰り返しますが、パルス幅変調は、制御キーを使用してパルスのデューティ サイクルを変更することにより、積分負荷の平均電圧値を制御することです。
積分負荷に対する PWM の動作を図に示します。 1.
図1
このような PWM の使用の主な条件は、積分負荷が存在することです。
電圧の振幅値がEに等しいためです。
これらには、RC、LC、RLC、または RL 回路と機械的インテグレータ (電気モーターなど) を統合することができます。
PWM が積分負荷で動作する場合、電圧、つまり等価 DC 電圧はパルスのデューティ サイクル (Q) に応じて変化します。< 1
Q = t および /T
ここで: Q - デューティ サイクル、t および - パルス持続時間、T - パルス繰り返し周期。
デューティ サイクルを考慮すると、等価 DC 電圧は次のようになります。
ここで: E eq - 等価直流電圧 (ボルト)、Q - デューティ サイクル、E - PWM コンバータに電力が供給される電源の電圧 (ボルト)。
実際には、E に等しい電圧が PWM 負荷端子に印加され、電流 (または電気モーターの回転数) によって行われる仕事は E eq によって正確に決定されます。 積分コンデンサで復元すると、正確に等価電圧 E が得られます。
PWM によって制御される制御スイッチに割り当てられる電力は次のようになります。
P max = Q x I x U us
PWMへの負荷接続図。
DC 電動機をオンにする回路と異なるもの ( 特別な場合負荷)には PWM 回路ソリューションは必要ありません。 電気モーターは、PWM モードで動作する電源に接続するだけです。 特定の状況では、パルスの前部で発生するノイズの追加のフィルタリングを導入する必要がある場合を除きます。 図のこのフィルターは、 2はコンデンサとダンピングダイオードの形態である。

図2
図では、 図2はそのような接続を示している。
スイッチ(電界効果トランジスタ)を可変抵抗器に簡単に置き換えることができることがわかります。
PWM回路
記事「3 ピンから 4 ピンファンへのアダプター」http://de1fer.ru/?p=45#more-45 では、ブログ所有者が P WM を備えたファンの図を提供しています。

図3
ここで: GND - グランド (共通)、Control - 接点 P WM 制御、+12 - 電源電圧、Sense - 速度センサー出力。
この回路ではPWM信号ではなく直流+I制御で制御が可能です。
パルス(PWM)信号を制御するには図のような回路が必要です。 4. そして、「PWM」トランジスタのパラメータから判断すると、特に直流制御用に選択されました。 少なくとも、最大 1.6 W のファンを搭載したこのモードでは正常に動作します。

図4
しかし、コンデンサ C のないパルスモードでは、BC879 トランジスタの発熱は直流時よりもわずかに低くなり、トランジスタの入力容量 C input での積分により、電気モーターは短い電流パルス持続時間 (低速) で停止する可能性があります。
シリコンバイポーラ高周波の主なパラメータ npnトランジスタおよびシーメンスのBC879
| PC最大値 | Ucb 最大 | エースマックス | ウェブマックス | アイマックス | Tj 最大、°C | 最大フィート |
| 800mW | 100V | 80V | 5V | 1A | 150℃ | 200MHz |
必要に応じて、図の回路で PWM (PWM) 制御を無効にします。 3 制御ピンを +12v ワイヤに接続するだけです。
Radeon.ru フォーラムには、P WM を備えたファン回路の別のバージョンがあります。

図5
図との大きな違い 3 いいえ、内蔵または誘導された p 型チャネルを備えた MOS 電界効果トランジスタのみが PWM 制御スイッチとして使用されます。 このスキーム P WM と定電圧の両方で制御することもできます (ただし、リスクを負う価値はありません。トランジスタのパラメータを知る必要があります)。
この回路は完全に動作し、図に示す回路の欠点はありません。 3.
(トランジスタの種類に応じて) オフにするには、制御ピンを + または - ワイヤに接続するだけです。
DIY愛好家に注目!
マザーボード (システム) ボードに組み込まれている PWM 制御アルゴリズムに満足できない場合。
そして、自分に合ったレオバス (ファン コントロール コントローラー) を持っている場合は、3 ピン コネクタ付きのファンを使用してください。
PWM を備えたファンが大切であるか、代替品がない場合は、上記の方法で PWM を無効にし、4 ピンのコネクタを 3 ピンのコネクタに交換してレオバスに接続する必要があります。
ただし、異常なモードで PWM ファンを使用すると、その最大のパフォーマンスを達成できないことに注意してください。
ファンの供給電圧が 10 ~ 20% 低下するため、PWM と同時に直流制御を使用することはお勧めできません。これにより、このようなファンは最大の性能を発揮できなくなります。
電源回路に沿って PWM - PWM を同時に使用すると、ファン動作が周期的に不安定になり (システムの電源回路に沿って PWM - PWM の周波数間でスライディング ビートが発生する可能性があります)、速度安定化システムを備えたシステムに曖昧さが生じる可能性があります。 。 さらに、前のケースと同様に、ファンにかかる電圧が 10 ~ 15% 低下するため、ファンが最大限の性能を発揮できなくなります。
そこで、一つのことに止まります。 PWM ファンを使用するか、3 ピン コネクタを備えたファンの電源回路を介して外部ファン制御を使用します。
結論
PWM (以前は PWM と呼ばれていました) を使用すると、電圧降下 DC デバイスの効率が向上し、PWM を使用する電子デバイスの全体的な発熱が削減されます。
PWM を使用すると、コンパクトな高出力 DC 制御電気駆動システムを作成できます。
で 最新のデバイス DC 電圧制御および降圧電圧レギュレータは通常、PWM を使用して調整されます。 この目的のために、最小限の付属品を必要とするコントローラが製造されています。
これでダンピング抵抗器や加減抵抗器に別れを告げることができます。
A. ソローキンによって作成されました。
この記事では、K140UD6 オペアンプに基づいて実装された、直流ベースのレギュレータの 2 つの回路図について説明します。
PWM 電圧レギュレータ 12 ボルト - 説明
これらの回路の特徴は、電源電圧が 12 ボルトなどの、入手可能なあらゆるオペアンプを事実上使用できることです。
オペアンプの非反転入力 (ピン 3) の電圧を変更することで、出力電圧を変更できます。 したがって、これらの回路は、調光器の電流および電圧レギュレータとして、また DC モータ速度レギュレータとしても使用できます。
回路は非常に単純で、シンプルでアクセス可能な無線コンポーネントで構成されており、正しく取り付けられていれば、すぐに動作し始めます。 強力な電界効果のあるnチャネルトランジスタが制御スイッチとして使用されています。 電界効果トランジスタの電力とラジエーターの面積は、負荷の消費電流に応じて選択する必要があります。
電界効果トランジスタのゲートの破壊を防ぐために、電源電圧 24 ボルトの PWM レギュレータを使用する場合、VT2 のゲートとトランジスタ VT1 のコレクタの間に 1 kOhm の抵抗を接続する必要があります。抵抗 R7 と並列の 15 ボルトのツェナー ダイオード。
接点の1つがグランドに接続されている負荷の電圧を変更する必要がある場合(これは自動車で発生します)、nチャネル電界効果トランジスタのドレインが接続された回路が使用されます。を電源のプラスに接続し、負荷をその電源に接続します。
![]()
電界効果トランジスタが完全に開く条件を作り出すことが望ましく、ゲート制御回路には 27 ~ 30 ボルト程度の電圧が上昇したノードが含まれている必要があります。 この場合、ソースとゲート間の電圧は15 Vを超えます。
負荷電流消費が 10 アンペア未満の場合は、PWM レギュレータに強力な電界効果 p チャネル トランジスタを使用できます。
2番目のスキームでは PWM電圧レギュレータ12ボルトトランジスタVT1の種類も変化し、可変抵抗器R1の回転方向も変化する。 したがって、回路の最初のバージョンでは、制御電圧が低下する (ハンドルが「-」電源に移動する) と、出力電圧が増加します。 2 番目のオプションでは、すべてが逆になります。
kravitnik.narod.ru

ポータブル USB オシロスコープ、2 チャンネル、40 MHz....

DC モーターの回転速度を制御する最も簡単な方法は、パルス幅変調 (PWM または PWM) の使用に基づいています。 この方法の本質は、電源電圧がパルスの形でモーターに供給されることです。 この場合、パルス繰り返し率は一定のままですが、その持続時間は変化する可能性があります。
PWM 信号は、デューティ サイクルやデューティ サイクルなどのパラメータによって特徴付けられます。 これはデューティ サイクルの逆数であり、パルス持続時間とその周期の比に等しくなります。
D = (t/T) * 100%
以下の図は、異なるデューティ サイクルの PWM 信号を示しています。
この制御方法では、モーターの回転速度は PWM 信号のデューティサイクルに比例します。
簡単なDCモーター制御回路
最も単純な DC モーター制御回路は、ゲートに PWM 信号が供給される電界効果トランジスタで構成されます。 この回路のトランジスタは、モーター端子の 1 つをグランドに切り替える電子スイッチとして機能します。 トランジスタはパルス持続時間の瞬間に開きます。

このようにエンジンをかけると、エンジンはどのように動作するのでしょうか? PWM信号の周波数が低い(数Hz)場合、モーターがガタガタと回転します。 これは、PWM 信号のデューティ サイクルが小さい場合に特に顕著になります。
モーターは数百 Hz の周波数で連続回転し、その回転速度はデューティ サイクルに比例して変化します。 大まかに言えば、エンジンは供給されるエネルギーの平均値を「認識」します。
PWM信号を生成する回路
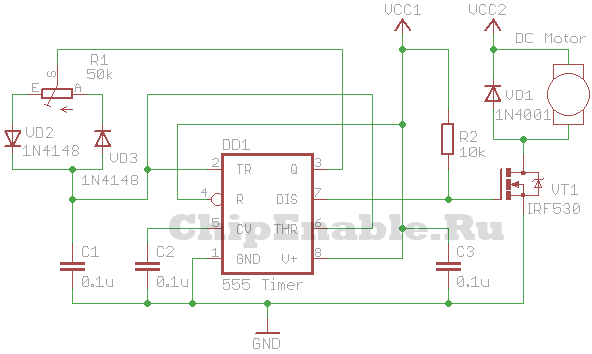
PWM 信号を生成する回路は数多くあります。 最も単純な回路の 1 つは、555 タイマーに基づく回路です。 最小限のコンポーネントが必要で、セットアップは不要で、1 時間で組み立てられます。

VCC 回路の電源電圧は 5 ~ 16 ボルトの範囲になります。 ほとんどすべてのダイオードをダイオード VD1 ~ VD3 として使用できます。
この回路がどのように動作するかを理解したい場合は、555 タイマーのブロック図を参照する必要があります。 このタイマーは、分圧器、2 つのコンパレータ、フリップフロップ、オープンコレクタ スイッチ、および出力バッファで構成されます。

電源 (VCC) ピンとリセット ピンは電源プラス (たとえば +5 V) に接続され、グランド ピン (GND) はマイナスに接続されます。 トランジスタのオープンコレクタ (DISC ピン) は抵抗を介して電源のプラスに接続されており、そこから PWM 信号が除去されます。 CONT ピンは使用されません。コンデンサが接続されています。 THRES および TRIG コンパレータ ピンは結合され、可変抵抗器、2 つのダイオード、およびコンデンサで構成される RC 回路に接続されます。 可変抵抗器の中間ピンは OUT ピンに接続されます。 抵抗器の両端はダイオードを介してコンデンサに接続され、コンデンサは 2 番目の端子でグランドに接続されます。 このダイオードの組み込みのおかげで、コンデンサは可変抵抗器の一方の部分を通じて充電され、もう一方の部分を通じて放電されます。
電源がオンになった瞬間、OUT ピンは論理レベル Low になり、VD2 ダイオードのおかげで THRES ピンと TRIG ピンも論理レベルになります。 低レベル。 上部のコンパレータは出力を 0 に切り替え、下部のコンパレータは出力を 1 に切り替えます。 トリガーの出力はゼロに設定され (出力にインバーターがあるため)、トランジスタ スイッチが閉じ、OUT ピンは (入力にインバーターがあるため) ハイ レベルに設定されます。 次に、コンデンサ C3 はダイオード VD1 を介して充電を開始します。 特定のレベルまで充電されると、下側のコンパレータがゼロに切り替わり、次に上側のコンパレータが出力を 1 に切り替えます。 トリガ出力はユニティレベルに設定され、トランジスタスイッチが開き、OUTピンはローレベルに設定されます。 コンデンサ C3 は、完全に放電されるまでダイオード VD2 を通じて放電を開始し、コンパレータがトリガを別の状態に切り替えます。 その後、このサイクルが繰り返されます。
この回路によって生成される PWM 信号のおおよその周波数は、次の式を使用して計算できます。
F = 1.44/(R1*C1)、[Hz]
ここで、R1 の単位はオーム、C1 の単位はファラッドです。
上の図に示されている値では、PWM 信号の周波数は次のようになります。
F = 1.44/(50000*0.0000001) = 288 Hz。
PWM DCモータースピードコントローラー
上に示した 2 つの図を結合してみましょう。 簡単な図 DC モーター スピード コントローラー。玩具、ロボット、マイクロ ドリルなどのモーターの速度を制御するために使用できます。
VT1 は、所定の電圧およびシャフト負荷での最大モーター電流に耐えることができる n 型電界効果トランジスタです。 VCC1 は 5 ~ 16 V、VCC2 は VCC1 以上です。
電界効果トランジスタの代わりに、バイポーラ n-p-n トランジスタ、ダーリントン トランジスタ、または適切な電力のオプトリレーを使用できます。
導入
液晶ディスプレイ (LCD) はさまざまな環境で使用されるため、明るさを調整でき、明るい場所でも暗い場所でも使用できるディスプレイを製造することが望ましいです。 ユーザーは、動作条件や全体的な照明に応じて、画面を快適な明るさレベルに調整できます。
通常、メーカーはディスプレイの仕様にディスプレイの最大輝度を記載していますが、最大輝度で使用する可能性は低いため、画面が動作可能なより低い輝度レベルを考慮することが重要です。 仕様には最大 500 cd/m² の値が含まれることがよくありますが、目がもう少し快適な明るさで画面を使用することをお勧めします。
tftcentral.co.uk の各レビューでは、バックライトの調光と対応する輝度値の全範囲をテストしています。 キャリブレーション中は、画面の明るさを 120 cd/m² に設定することも試みます。これは、通常の照明条件下での LCD モニターの推奨レベルです。 これは、日常的に使用する可能性が最も高い輝度レベルを設定する方法を理解するのに役立ちます。
蛍光灯 (CCFL) と発光ダイオード (LED) バックライトの両方の場合、ディスプレイの明るさの変更は、バックライトの全体的な光出力を下げることによって実現されます。 現在、バックライトを減光するために最も一般的に使用されている方法は、デスクトップおよびラップトップのディスプレイで長年使用されているパルス幅変調 (PWM) です。 しかし、この方法にはいくつかの問題がないわけではありません。 高いレベル LED バックライトの明るさと普及に伴い、PWM の副作用が以前よりも顕著になり、場合によっては、PWM に敏感な人に視覚疲労を引き起こす可能性があります。
この記事の目的は、警告することではなく、PWM がどのように動作するか、PWM が使用される理由、およびこれらの効果をより明確に確認するためにディスプレイをテストする方法を説明することです。
PWMとは何ですか?
パルス幅変調 (PWM) は、バックライトのオンとオフを急速に繰り返すことで機能し、ディスプレイの知覚される明るさを低減する方法です。 このパルスの周期的な供給は通常、一定の周波数で発生し、各サイクルのバックライトが点灯している部分の持続時間とサイクルの合計持続時間の比をデューティ サイクル (デューティ サイクルの逆数) と呼びます。 。 デューティ サイクルを変更することにより、バックライトの全体的な光出力が変化します。 視覚レベルでは、バックライトがオンとオフの状態をすばやく切り替えるため、フリッカー フュージョンのしきい値を超えているためにユーザーはフリッカーに気付かないため、このメカニズムは機能します (これについては以下で詳しく説明します)。
以下に、「理想的な」PWM を使用した数サイクルにわたるバックライトの光出力のグラフを示します。 この例のバックライトの最大光出力は 100 cd/m² で、フィルファクタ 90%、50%、および 10% の知覚輝度はそれぞれ 90、50、および 10 cd/m² です。 1 サイクル中の最小輝度レベルと最大輝度レベルの比率は変調深度と呼ばれます。 この場合 100%です。 与えられた例のサイクル中、バックライトの輝度は最大になることに注意してください。
係数。 充填率90%  係数。 50%充填
係数。 50%充填  係数。 充填10%
係数。 充填10% 
知覚される明るさレベルに対応するアナログ (非 PWM) グラフを以下に示します。 ここには変調はありません。
一定の明るさ 90%  一定の明るさ 50%
一定の明るさ 50%  一定の明るさ 10%
一定の明るさ 10% 
なぜPWMが使われるのか?
PWM を使用する主な理由は、バックライトのオンとオフを頻繁に切り替える機能のみが必要な実装の容易さと、PWM によって提供される可能な輝度値の範囲が広いことです。
ランプに流れる電流を減らすことで CCFL バックライトの輝度を下げることは可能ですが、電流と電圧の要件が厳しいため、その輝度は約半分にとどまります。 これにより、PWM のみが有効になります。 簡単な方法で幅広い明るさコントロールを実現します。 CCFL ランプは通常、インバータによって制御され、人間が知覚できるちらつきを超えた数十キロヘルツの周波数でオン/オフを切り替えます。 ただし、PWM は通常、かなり低い周波数 (約 175 Hz) で動作するため、画像に顕著なアーチファクトが発生する可能性があります。
LEDバックライトは、色温度が若干変化しますが、流す電流を変えることで輝度を広範囲に調整できます。 LED の明るさを変更するこのアナログなアプローチも、補助回路が LED によって発生する熱を考慮する必要があるため、望ましくありません。 LED がオンになると発熱し、抵抗が減少し、LED に流れる電流がさらに増加します。 これにより、超高輝度 LED の電流が急激に増加し、故障の原因となる可能性があります。 PWM を使用すると、動作サイクル中に電流を強制的に一定レベルに保つことができるため、色温度は常に同じになり、過電流は発生しません。
PWM の副作用
上で概説した理由によりメーカーにとって PWM は魅力的ですが、不用意に使用すると不快な結果を招く可能性もあります。 視覚効果。 私たちが見ているものを理解するには、実際のディスプレイのちらつきを見る必要があります。 以下は、CCFL バックライトの速度を 40 倍にして、ちらつきを見やすくしたビデオです。 そのすぐ下に、1周期におけるRGB成分の明るさの変化のグラフが表示されます。 この特定のディスプレイは、ちらつきが最も顕著になる最小輝度に設定されています。
ビデオと対応するグラフからわかるように、1 サイクル中に全体の明るさが約 4 倍変化します。 興味深いことに、バックライトの色もサイクルごとに大きく変化します。 これは、CCFL の蛍光体の応答時間が異なるという事実による可能性が最も高く、その場合、青色光の生成に関与する蛍光体は他の色の場合よりも速くオン/オフする可能性があると結論付けることができます。 また、蛍光体の使用は、動作サイクルの終わりにバックライトが消灯した後もバックライトが数ミリ秒間発光し続け、そうでない場合よりもより一定のレベルの光 (変調が少ない) を提供することを意味します。 時間平均された色は変化しないことに注意してください。

LED バックライトのちらつきは、通常、同じデューティ サイクルでの CCFL バックライトのちらつきよりもはるかに目立ちます。これは、LED がはるかに速くオンとオフを切り替えることができ、電源がオフになった後は点灯し続けることがないためです。 これは、CCFL バックライトがかなり滑らかな明るさの変動を示したのに対し、LED バージョンはオン状態とオフ状態の間でより鋭い遷移を示すことを意味します。 だからこそ、ごく最近、PWM の話題がインターネットやレビューで取り上げられ始めました。 もっと白色 LED (W-LED) をベースとした LED バックライト付きディスプレイ。 以下に示すように、動作サイクル中にバックライトの色に大きな変化はありません。

ちらつき効果は、ユーザーの目が動いたときに特に顕著になります。 一定のちらつきのない照明 (太陽光など) では、画像は滑らかにぼやけます。これが、通常、私たちが動きを認識する方法です。 ただし、PWM 光源と組み合わせると、複数の別々の画面の残像が同時に見える可能性があり、その結果、可読性が低下し、物体を注視する能力が低下する可能性があります。 CCFL バックライトの以前の分析から、元の画像が白黒であっても、色の歪みが発生する可能性があることがわかっています。 以下は、さまざまな種類のバックライトを使用して目が水平に動いたときにテキストがどのように見えるかを示す例です。
元の画像 PWM なし CCFL バックライト付き PWM LED バックライト付き PWM
これは純粋にバックライトによるものであり、ディスプレイには静止画像が表示されることを覚えておくことが重要です。 人間は毎秒 24 フレーム (fps) を超える速度を認識できないとよく言われますが、これは真実ではなく、実際には、連続的な動きを認識するのに必要なおおよそのフレーム レートにのみ対応します。 実際、目を動かすとき (読書など)、数百ヘルツでちらつき効果が見られることがあります。 ちらつきに気づく能力は人によって大きく異なり、周辺視野が最も敏感であるため、ディスプレイに対するユーザーの位置によっても異なります。
では、PWM を使用している場合、バックライトはどのくらいの頻度でオン/オフになりますか? どうやら、使用するバックライトの種類に依存するようです。 蛍光灯ベースのバックライトは、ほとんどの場合、175 Hz、つまり 1 秒あたり 175 回の周波数で切り替わります。 LEDバックライトの点滅周波数によると、 異なる情報の範囲は 90 Hz から 420 Hz で、周波数が低いとちらつきがさらに目立ちます。 周波数が高すぎて気付かないように思えるかもしれませんが、175 Hz は、主電源に直接接続されたランプで一般的な 100 ~ 120 Hz のちらつきよりもそれほど頻繁ではないことに注意してください。
実際、蛍光灯の 100 ~ 120 Hz の点滅周波数は、一部の人に目の疲れや頭痛などの症状を引き起こすことがあります。 このため、ほぼ連続的な光出力を提供する高周波安定化回路が開発されました。 低周波数で PWM を使用すると、ほぼ連続した光源が再びちらつくため、バックライトでこれらの改良された安定化回路を使用する利点が無効になります。 さらに、蛍光灯をベースとした照明の低品質または欠陥のある安定器は可聴ノイズを発生する可能性があることを考慮する必要があります。 これは、PWM を使用するときによく発生します。これは、電子機器が消費電力が変化する追加の周波数を処理するためです。
陰極線管 (CRT) ディスプレイと、CCFL および LED バックライトを備えた TFT ディスプレイのちらつきの違いを理解することも重要です。 CRT は 60 Hz の低周波数でちらつくことがありますが、電子銃のビームが上から下に移動するため、常に狭い帯域だけが照射されます。 CCFL および LED バックライト付き TFT ディスプレイでは、画面の表面全体が同時に点灯するため、短時間でより多くの光が放射されます。 場合によっては、特にデューティ サイクルが高い場合、これは CRT のちらつきよりも煩わしい場合があります。
ディスプレイのバックライトのちらつき自体は、人によっては微妙で目立たないかもしれませんが、人間の視覚の自然な違いにより、非常に目立つ人もいます。 高輝度 LED の使用が増えるにつれ、輝度を制御するために高 PWM デューティ サイクルを使用する必要が増え、フリッカーの問題がより差し迫ったものになっています。 ユーザーが毎日何時間もモニターを見ていることを考えると、知覚されるフリッカーと気づかれないフリッカーの両方の長期的な影響を考慮する必要があるのではないでしょうか。
PWM の副作用を軽減する
PWM バックライトのちらつきが煩わしい場合、またはちらつきを軽減すると読みやすくなるかどうかを確認したい場合は、次のことを試してみることをお勧めします。 モニターの明るさを最大に設定し、すべての自動明るさ調整メカニズムを無効にします。 次に、グラフィックス カード ドライバーで利用可能な色補正を使用するか、キャリブレーション デバイスを使用して、明るさを通常のレベル (通常はコントラスト スライダーを使用) まで下げます。 これにより、モニターの明るさとコントラストが低下し、PWM サイクル全体でできるだけ長くバックライトがオンのままになります。 コントラストの低下は多くの人にとって長期的な解決策ではないかもしれませんが、この手法は PWM 使用量の削減によるプラスの影響の程度を判断するのに役立ちます。
もちろん、もっと良い方法は、明るさの制御に PWM を使用しないディスプレイ、または少なくともはるかに高い PWM 周波数を使用するディスプレイを購入することです。 残念ながら、知覚される視覚的欠陥の限界を超える周波数 (おそらく CCFL の場合は 500 Hz をはるかに超え、LED の場合は 2 KHz 以上) で動作する PWM を実装したメーカーはまだないようです。 さらに、PWM を使用する一部のディスプレイは最大輝度でも 100% のフィルファクターを持たず、いずれにしてもちらつきの原因となります。 現在入手可能な LED バックライト付きディスプレイの一部は PWM を使用していない可能性がありますが、バックライトの周波数と変調が技術仕様で指定されるまでは、個々のディスプレイを実際にテストする必要があります。
検証と分析
バックライトの PWM 周波数を簡単に測定する方法があれば素晴らしいと思いますが、幸いなことに、これを行う機能を備えたカメラがあれば十分です。 手動設定抜粋。 このメソッドの正確な使用方法については、以下で説明します。
射撃:
- モニターをテストしたい設定に設定します。
- (オプション) 画面に白だけが表示される場合のカメラのホワイト バランスを設定します。 これが不可能な場合は、ホワイト バランスを手動で約 6000K に設定します。
- 細い白を表示する 縦縞黒い背景に(1〜3ポイントの厚さで十分です)。 この画像のみが表示されるはずです。
- カメラのシャッター スピードを 1/2 ~ 1/25 秒の値に設定します。 撮影に十分な光を得るには、ISO 感度と絞りを調整する必要がある場合があります。 ストリップが焦点距離に配置されていることを確認します (必要に応じて修正してください)。
- カメラをモニターから約 60 cm 離し、モニターに対して垂直に持ちます。 カメラを画面に対して水平にゆっくりと動かしながら、シャッター ボタンを押します (移動するときはカメラを互いに垂直に保ちます)。 さまざまな速度でカメラを動かしてみることが必要な場合があります。
- パターンがはっきりと見えるように、結果の画像の明るさを調整します。
- 画像にキャプチャされたサイクルの数を数えます。
- この数値をシャッタースピードで割ります。 たとえば、1/25 秒のシャッター速度を使用して 7 サイクルをカウントする場合、1 秒あたりのサイクル数は 25 * 7 = 175 Hz となります。 バックライトの点滅周波数です。
 写真
写真  有用な断片を切り出す
有用な断片を切り出す 
このテクニックのポイントは、撮影中にカメラを動かすことで、時間的な効果を空間的な効果に変えることです。 撮影時の唯一の重要な光源は、連続する列の形で感光性マトリックスに当たる画面上の狭いストリップです。 バックライトがちらつく場合、別の列に さまざまな意味撮影時の特定の瞬間のバックライトによって決まる明るさや色。
この手法を初めて使用しようとするときによくある問題は、画像が暗すぎることです。 カメラの絞りを大きくする (F 値を下げる) か、ISO 感度を上げることで、この点の状況を改善できる可能性があります。 シャッタースピードは撮影全体の時間を制御するためにのみ使用されるため、露出には影響しません。 画像の明るさは、カメラの速度を変更することで調整することもできます。 詳細 高速より高い時間解像度では暗い画像が得られ、より低い速度ではより低い解像度でより明るい画像が得られます。
もう 1 つの一般的な問題は、撮影中のカメラの速度の変化により、結果として得られる画像内の個々のストライプ間の距離が等しくないことです。 一定の速度を実現するには、撮影開始の少し前にカメラを動かし始め、終了してからしばらくしてからカメラを動かします。
画像が平坦すぎる場合は、焦点が合っていない可能性があります。 場合によっては、シャッターボタンを半押ししてピントを合わせた後、通常どおり操作を続けることで対処できる場合があります。

お使いのモニターによっては、次のような症状が発生する場合があります。 追加効果。 CCFL ベースのバックライトは、各サイクルの開始時と終了時に異なる色を示すことがよくあります。これは、使用される蛍光体が反応することを意味します。 さまざまな速度で。 LED バックライトは CCFL バックライトよりも高い周波数を使用することが多く、サイクルを確認するにはカメラをより速く動かす必要がある場合があります。 サイクル間の暗いバーは、サイクルのその部分で光が放射されない程度に PWM デューティ サイクルが増加したことを意味します。
デル 2007WFP (CCFL)
明るさ = 100 明るさ = 50
明るさ = 50  明るさ = 0
明るさ = 0 
1/25 秒のシャッター速度を使用すると、7 サイクルがはっきりとわかります。これは、バックライトが 175 Hz で点滅することを意味します。 最大の明るさでも多少のちらつきはありますが、目立たないほど小さいと思われます。 半分の明るさではわずかなちらつきがあり、最小の明るさに達すると、色の変化とともにさらに顕著なちらつきが発生します。
NEC EA231WMi (CCFL)
明るさ = 100 明るさ = 50
明るさ = 50  明るさ = 0
明るさ = 0 
最大の明るさでは、目に見えるちらつきはありません。 明るさが半分になるとちらつきや色ずれが目立ちます。 最小の明るさでは、ちらつきが多くなり、色の変化が顕著になります。 1/25 秒のシャッター速度では、約 8 サイクルが表示され、これは約 200 Hz の周波数に相当します。 シャッタースピードが長くなると、より正確な周波数値 (210 Hz) が得られます。
サムスン LN40B550 テレビ (CCFL)
明るさ = 最大 明るさ = 最小
明るさ = 最小 
自動輝度調整を無効にするオプションはないため、簡単に達成できる最大および最小の輝度レベルが表示されます。 最大の明るさでは、目に見えるちらつきはありません。 最小の明るさでは、強いちらつきと色ずれが発生し、黄色と青の成分に分離して見えます。 1/25 秒のシャッター速度では、6 サイクルのみが表示されます。これは、バックライトが 150 Hz の周波数で点滅することを意味します。
2009 Apple MacBook (LED)
明るさ = 100 明るさ = 50
明るさ = 50  明るさ = 0
明るさ = 0 
シャッタースピード1/25秒使用時は、明るさに関わらずちらつきや色ずれが目立ちません。 このディスプレイは PWM を使用しません。 スジの原因は画像のノイズです。
2008 Apple MacBook Pro (LED)
明るさ = 100 明るさ = 50
明るさ = 50  明るさ = 0
明るさ = 0 
1/25 秒では、最大の明るさで多少のちらつきがあります。 明るさ 50 および 0 では、非常に高いデューティ サイクルが使用されるため、強いちらつきが発生します。 この LED バックライトは 420Hz という高い周波数を使用しますが、ちらつきを除去するにはまだ低すぎます。 サイクル間で目に見える色の変化はありません。
結論
冒頭で述べたように、この記事は人々を怖がらせて現代の LCD ディスプレイから遠ざけるために書かれたものではなく、PWM に関連する潜在的な問題について人々に認識してもらうために書かれたものです。 白色発光ダイオード (W-LED) バックライト付きモニターの人気が高まるにつれ、使用される PWM 方式と最終的に選択されるバックライトの種類に基づいて、古いディスプレイよりも多くのユーザーの苦情が発生する可能性があります。 もちろん、PWM の使用によって引き起こされる可能性のある問題は、すべての人が気づくわけではありません。実際、ここで説明した症状を経験しない人の方が、実際に経験する人よりもはるかに多いと私は予想します。 頭痛や眼精疲労などの副作用に苦しむ人々のために、少なくとも説明ができるようになりました。
PWM には長い成功の歴史があり、CCFL ディスプレイで長年使用されてきたことを考えると、たとえ LED バックライトへの移行が進んだとしても、これがすぐに変わるとは率直に思います。 PWMはまだ 信頼できる方法でバックライトの強度を制御するため、すべてのユーザーが必要とする調光オプションを提供します。
副作用を心配している人、または以前のディスプレイで問題があった人は、新しいディスプレイの PWM 周波数を決定し、バックライトの明るさの制御に PWM をまったく使用しない画面を探してみるべきです。 残念ながら、メーカーが何かを指定しているのをまだ見たことがありません。 技術仕様 PWM の使用、または特定の輝度レベルでのその周波数に関しては、現時点で判断するのは困難です。
画面の明るさを最大に設定することは、デューティ サイクルの低下による副作用を軽減する方法の 1 つです。 多くのディスプレイは非常に高い工場出荷時の性能や、 最大レベル明るさですが、それは役立つかもしれません。 ソフトウェアで明るさを制御するか、ビデオ カード ドライバーを使用すると、より快適な明るさに戻すことができますが、コントラストが低下する可能性があります。
-
 2015 年 4 月 17 日手順: リリースされた高品質のドメインを傍受する方法!
2015 年 4 月 17 日手順: リリースされた高品質のドメインを傍受する方法! -
 2015 年 4 月 17 日ブートローダーが破損した場合に Windows XP を復元して起動する
2015 年 4 月 17 日ブートローダーが破損した場合に Windows XP を復元して起動する -
 2015 年 4 月 17 日ソフトウェアのインストール、ターゲット コンピュータにソフトウェアをインストールするインストール プロセス
2015 年 4 月 17 日ソフトウェアのインストール、ターゲット コンピュータにソフトウェアをインストールするインストール プロセス -
 2015 年 4 月 17 日Meizu に Flyme アップデートをインストールする 2 つの方法 Meizu M3 の Android アップデート
2015 年 4 月 17 日Meizu に Flyme アップデートをインストールする 2 つの方法 Meizu M3 の Android アップデート





